

MU-6-3 Inertial Measurement Sensor
key word:

Hotline:
Description
6-DOF IMU
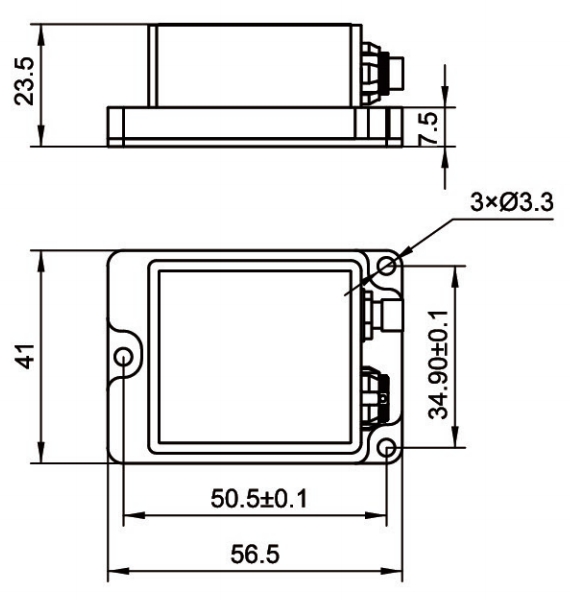
Apparent Structure(Unit:mm)
Application
· Industry
UVA navigation
Robotic submarine
Automatic guided vehicle
Navigation correction
Measurement and Testing
· Military
MilitaryAircraft navigation
Remote control
weapon station
Tactical missile
Rocket bomb
Brief Introduction
IMU-6-3 has characters with the weight only 50 grams, and adoptsGNSS/GPS/ BeiDou Navigation inside subsidiary inertial measurementunit, Inside lMU-6-3 is set with the optimized Kalman flter algorithminside, which also provides an external synchronous signal input.lMU-6-2has full-range temperature compensation. The output format, samplingrate, filter settings and Datagram content could set by the client
Feature
Inner optimized motion algorithm,based upon improved Kalmanalgorithm
Weight:50 grms
Size57x42x24mm
Integral impact vibration survival: 2000g
Low noise gyroscope,high performance accelerometer
Excellent paranoid stability
High reliability via the actually measured data offered
High speed RS422 output
Customized higher index of the specification: Zero bias instability is0.5°/h, ARW is 0.2Vh
Model Specification
|
gyroscope |
Range |
±450°/s |
|
Zero bias |
≤25°/h(1σ) |
|
|
Zero bias stability |
≤10°/h(1o,1s smoothing) |
|
|
Zero bias repeatability |
≤10°/h(1σ) |
|
|
Nonlinear degree |
≤0.01%FS |
|
|
Cross coupling |
≤0.05° |
|
|
Resolution ratio |
0.005°/s |
|
|
Output noise |
0.01°/s rms |
|
|
Output frequency |
200Hz |
|
|
Inertia |
Frequency response |
>400Hz(-3dB) |
|
Measuring range |
x-axis:±165g,y/z-axis:±5g |
|
|
Zero bias |
≤0.01°/h(1σ) |
|
|
Zero bias stability |
≤40ug/h(1σ,1s smoothing) |
|
|
Zero bias repeatability |
≤0.003g(1σ) |
|
|
Nonlinear degree |
≤0.005 |
|
|
Cross coupling |
≤0.05° |
|
|
Resolution ratio |
≤0.002g |
|
|
Output noise |
80ug rms |
|
|
Output frequency |
200Hz |
|
|
Frequency response |
>400Hz(-3dB) |
Info Request
For all inquiries, please fill in the form below(* are required) to send us a brief message, and we will get back to you as soon as possible.
Recommended Products






Contact us
Tel:86-25-85300032
E-mal:info@govagroup.com
Add:No. 66, Qixia Avenue, Nanjing Economic and Technological Development Zone, Jiangsu Province